Kaua’i Labs is excited to announce it’s now a Studica Robotics Company, allowing Kaua’i Labs to better serve the needs of the Robotics Community.
With a focus on robotics and STEM since 1985, Studica is an innovative solution developer and supplier of future-focused technologies to Education and Industry.
Studica Robotics develops and manufactures a complete robotics Building System made up of mechanical structure, electronics, controllers, sensors, software, and training material that is used in education and in competitions around the world. The Studica Robotics Building System is modular and offers everything needed to build custom robots – ideal for the classroom, robotics teams, homeschoolers, hobbyists, and enthusiasts.
It is an enormous honor for us to partner with a worldwide organization that works with many partners to foster opportunities and connect societies with skills.
Announcing new Next-generation navX2-MXP and the recently-released navX2-Micro and VMX FRC Training Robot
The navX legacy continues…
2013: Kaua’i Labs releases nav6: 1st 6-axis IMU for FRC Teams
2015: Kaua’i Labs releases navX-MXP: 1st 9-axis IMU for FRC Teams. Onboard FRC World Champion Robots in 3 separate seasons.
Today: Kaua’i Labs continues leadership in FRC Navigation Technology, releasing “Generation 2” Industrial-strength navX2-MXP and paving the path for machine learning-based navigation sensing.
Kaua’i Labs announces the “Generation 2” Industrial-strength navX2-MXP for FIRST FRC Robotics – for only $99.
Significantly improved angular accuracy and stability, even during Extreme inertial events
Rapid (5-second) auto-calibrating Startup
Accurate real-time Velocity Vector Measurements
Improved Linear Displacement Measurements
“Drop-in Replacement” for “Classic” navX-MXP
Powered by blazing-fast Kalman Filter-based motion processing on a dedicated 180Mhz floating-point microcontroller, navX2-MXP raises the bar for IMU performance, is plug-n-play with the NI RoboRIO, and is engineered for ease of use by teams of all experience levels.
navX2-MXP’s new IMU features an Embedded Machine Learning Core, enabling development of future real-time Machine Learning-based inertial navigation Features.
Next-generation sensor for robotics including the FIRST Technology Challenge (FTC) and FRC.
navX2-Micro is a drop-in replacement for the “Classic” navX-Micro sensor, and features new IMU & Magnetometer sensors enabling increased accuracy.
navX2-Micro features an upgraded 180Mhz 32-bit floating-point microcontroller and an optimized startup time at 5 seconds versus 15 seconds. Angular accuracy is improved.
navX2 is powered by a new Kalman Filter-based Sensor Fusion algorithm running internally at a blazing fast 416Hz.
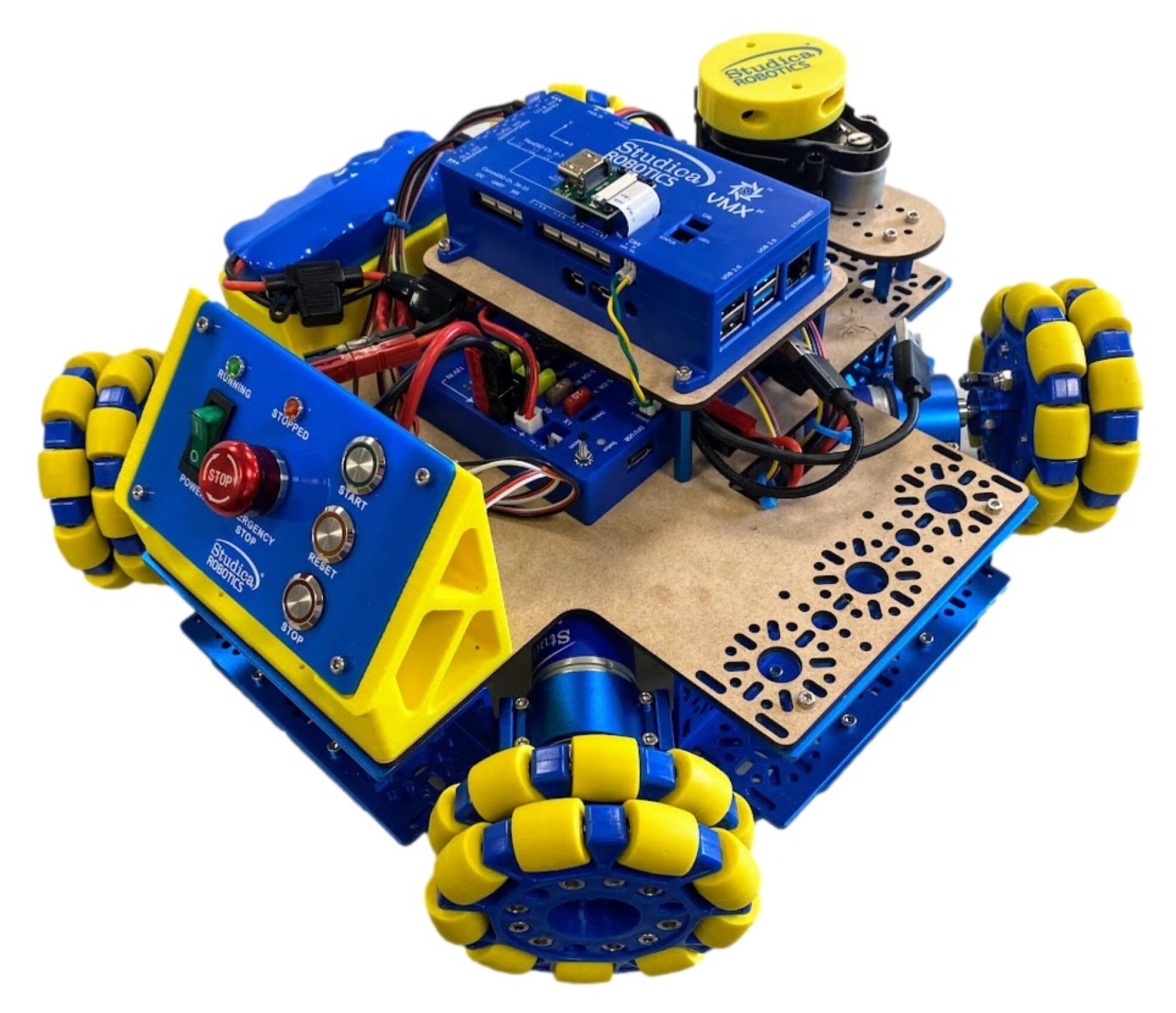
VMX FRC-Compatible Training Robot for the classroom
Kaua’i Labs has partnered with Studica Robotics to develop a smaller, sturdy, lightweight, and less expensive classroom robot than your typical FRC robot. This robot is powered by the Raspberry-pi based VMX-pi Robotics Controller developed by Kaua’i Labs, and uses the identical software development tools used in FRC for Java and C++ programming.
Schools can equip their labs with multiple FRC Trainers, benefiting from the great value and compact size. Students can even take the robot home with them!
This affordable solution is intended for:
FRC teams that want to learn and train on a smaller and more affordable robot Schools looking for a way to teach FRC robotics in the classroom – or remotely Schools that want to teach coding in the classroom through robotics
Kauai Labs announces the release of the “Second Generation” navX2 – a “drop-in replacement” for the “Classic” navX-Micro sensor, with several upgrades significantly improving accuracy.
In a nutshell, the startup time is now less than 5 seconds, accuracy of pitch, roll and yaw measurements are much improved, and due to lower accelerometer noise levels, the velocity and displacements are significantly improved.
navX2-Micro is completely compatible with the “Classic” navX-Micro, and internally features these upgrades:
navX2-Micro features the new 6-axis LSM6DSM IMU and LIS2MDL Magnetometer circuits from ST Microelectronics; these modern sensors feature lower noise, higher accuracy and improved shock resistance than the Invensense MPU-9250 found in the “Classic” navX-Micro sensor.
navX2-Micro features an upgraded onboard microcontroller which doubles the speed of that found on the “Classic” navX-Micro.
navX2-Micro uses a new Kalman Filter-based algorithm with improved accuracy and running at a much higher 415Hz update rate.
As a result of these enhancements, yaw drift is now much lower, startup time is reduced to only 5 seconds, and pitch/roll accuracy is also increased.
On July 15, 2019 Kauai Labs kicked off the beta of WPI Library Support for VMX-pi. This exciting software release allows FRC-compatible robots to be built with VMX-pi, using C++ or Java with the WPI Library – and using the same development tools and software used for competition FRC programming.
FRC Programming support via the WPI Library in Java and C++ on the VMX-pi platform allows FRC teams to learn and grow year-round:
Pre-season: train FRC software developers using the same FRC software development tools in Java and C++ used during competition – on the inexpensive, full-featured VMX-pi platform.
In-season: use VMX-pi as a vision coprocessor during competition to implement vision and motion processing, and control CAN devices.
Post-season: easily port your competition robot software to VMX-pi, freeing up your expensive control system for other uses.
Kauai Labs is proud to support FIRST Robotics and recently donated 150 navX-MXP Robotics Navigation sensors to the 2019 FRC FIRSTChoice program – making them freely available to FRC teams.
We’re happy to say that all 150 navX-MXP sensors were ordered on the first day of Round 1!
For those of you who missed acquiring one of the free sensors, Kauai Labs has plenty in stock – please visit the navX-MXP product page for more details.
Kauai Labs is proud to support FIRST Robotics and recently donated 100 VMX-pi Robotics Controllers/Vision & Motion Co-processors to the 2018 FRC FIRSTChoice program (Round 2) – making them freely available to FRC teams.
We’re happy to say that all 100 VMX-pi units were ordered on the first day of Round 2!
For those of you who missed acquiring one of the free sensors, Kauai Labs has plenty in stock – please visit the VMX-pi product page for more details.
Kauai Labs is proud to support FIRST Robotics and recently donated 100 navX-MXP Robotics Navigation sensors to the 2018 FRC FIRSTChoice program – making them freely available to FRC teams.
We’re happy to say that all 100 navX-MXP sensors were ordered on the first day of Round 1!
For those of you who missed acquiring one of the free sensors, Kauai Labs has plenty in stock – please visit the navX-MXP product page for more details.
Kauai Labs, a FIRST FRC supplier, is providing several open source products to FIRST Robotics Challenge (FRC) teams competing in the 2017 “Steamworks” competition.
These include:
navX-MXP Robotics Navigation Sensor
navX-Micro Robotics Navigation Sensor
SF2 Sensor Fusion Framework
These open source sensors and software libraries and framework enable sophisticated navigation capabilities to student-built robots, providing open access to examples, source code, schematics and training materials – helping inspire them Build Better Robots®.
New for 2017. Integrate navX-MXP/Micro with robotic Vision Processing to increase accuracy.
Kauai Labs announces the release of the new Sensor Fusion Framework (SF2). SF2 is a free, open-source software framework making navX-MXP and navX-Micro even more powerful – fusing multiple sensors together to help you build even better robots. Available in LabVIEW, C++ and Java for the RoboRIO, the initial SF2 release enables Video Processing Latency Correction on FRC robots.
Kauai Labs is proud to support FIRST Robotics and recently donated 200 navX-Micro Robotics Navigation sensors to the 2017 FRC FIRSTChoice program – making them freely available to FRC teams.
We’re happy to say that all 200 navX-Micro sensors were ordered on the first day of Round 1!
For those of you not fortunate enough to acquire one of the free sensors, we have plenty in stock – please visit the navX-Micro product page for more details.