 The “nav6” inertial measurement unit (IMU) was developed to provide sophisticated inertial navigation capabilities easily available to student robotics teams, including the FIRST Robotics Competition (FRC).
The “nav6” inertial measurement unit (IMU) was developed to provide sophisticated inertial navigation capabilities easily available to student robotics teams, including the FIRST Robotics Competition (FRC).
This low-cost circuit board enables a 4-wheel omni-directional drive robot to be driven in “field-oriented” drive mode by accurately measuring the robots “pose” – the amount of tip, tilt and rotation – relative to the field. Additionally, the nav6 can be used to implement robot balancing algorithms.
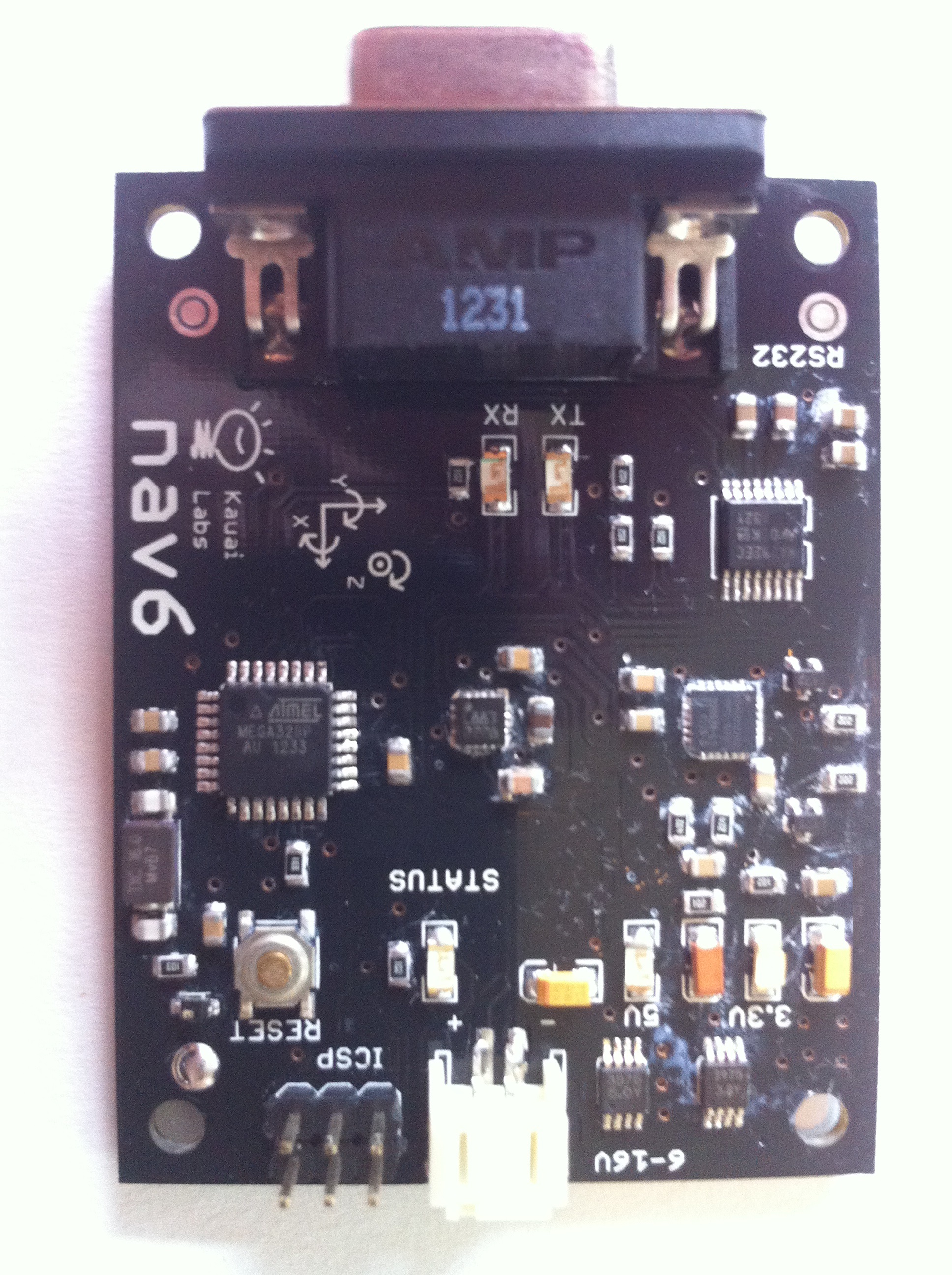
The nav6 employs the Invensense MPU-6050 IC which includes a 3-axis accelerometer and a 3-axis gyroscope and an on-chip digital motion processor. The nav6 also includes a Honeywell HMC5883L 3-axis magnetometer.
The nav6 is also Arduino-compatible, and can be programmed by anyone via the free Arduino Integrated Development Environment (IDE).
Additionally, software to easily integrate the nav6 into the FIRST robotics control system is available.
Open-source schematics, nav6 firmware source code and cRio code to interface with the nav6 are available online.
Since many robots use the 1 serial port on the cRIO for CAN, what other interfaces options will be available for NAV6? (I2C)?
For 2014, the RS-232 Serial port interface is the only method for connecting the nav6 to the CRio.
One possible approach is to replace the existing serial port interface to the CAN bus with an ethernet-based CAN bridge such as the 2CAN.
As noted above, the nav6 will work with the new RoboRio (which will used in FIRST robotics starting in 2015) via one of the USB Host interfaces.
When will there be a pcb with the 9150?