







































Studica Robotics

Build Better Robots®
Studica Robotics is a comprehensive robotics building platform with everything you need to build, learn, and compete. Our wide selection of durable robot parts and robotics kits are ideal for use in the classroom, robot competitions, robotics team training, and more. We offer a variety of structure and motion components, electronics, hardware, and building kits, you'll find everything you need to build and empower your robot with cutting-edge capabilities. Discover your true building potential with Studica Robotics.
Resources for Robotics
- 3D CAD files - Find all the 3D.STP files (Patented) you need for designing a robot or automation system using the Studica Robotics building system. To open and work with these files, use solid modeling software such as PTC Onshape, Solidworks, and Fusion 360.
- Training Videos - Discover training videos on the Studica Robotics products and check out our YouTube page to see them in action.
- View Catalog - Shop robotics building kits, robot parts, and more.
ATTN: FIRST Teams - You may be eligible for special pricing on robotics kits and parts. Fill in and submit this application form to find out.
View FTC options. View FRC options. Studica Robotics is committed to innovation and excellence, as evidenced by our partnership with WorldSkills and our exclusive supply of robotics components for the Autonomous Mobile Robotics Competition. Studica Robotics is used in over 40 countries around the world. View Usage Map. Contact us if we can help!









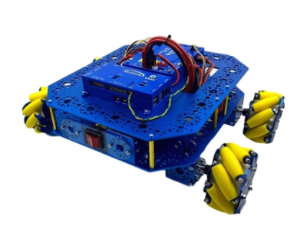
STEM BOT Pro Kit
The Studica Robotics STEM BOT Pro Kit is a powerful STEM learning tool designed to build a pushbot robot with a length of 17", width of 14.5" and a height of 7" from our high-quality, structurally sound, and safe parts. This build project is an excellent introduction to the world of robotics in STEM education.
This specially priced kit (total value of $1,439 in parts) has been designed as an effective, hands-on method to integrate critical thinking, problem-solving, and collaboration skills with your students. Additional components and sensors can be added to the base kit to enhance classroom learning. Instructional build materials are included, and the kit comes unassembled.

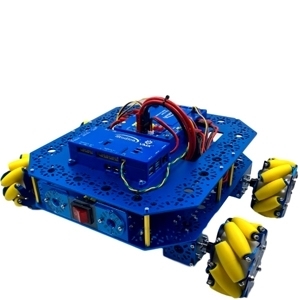
Classroom Robotics Kit
The Classroom Robotics Kit from Studica Robotics includes many parts for building a robot for the classroom and competitions. This kit is ideal for schools wanting to replicate an FTC-style robot kit and includes structure, controller, and electronics.
Special volume discount pricing is available for U.S. schools. Contact us at [email protected] for more information.
Download the components list for this kit here.

Cypher MAX Through Bore Encoder
This Studica Robotics rotary sensor offers a versatile comprehensive solution for measuring both relative and absolute positions, thanks to its ABI quadrature output and absolute position pulse output capabilities. The encoder is thoughtfully designed with a standard 3/8-inch Hex Through Bore, complete with strategically placed mounting holes to seamlessly integrate into various multi-channel systems.

#25 Chain and Sprocket Pack
The Studica Robotics #25 Chain and Sprocket Pack includes a #25 chain, a variety of sprockets, bronze bushings, shaft hubs, spacers, screws, collars and a chain breaker tool, ideal for your robotics designs.
")
#25 Chain with Master Links (5 feet)
The Studica Robotics #25 Chain with Master Links set, works with any of the Studica sprockets and other #25 sprockets. It includes 4 master links for creating various lengths of the chain.

1000mm T-Slot Extrusion
The Studica Robotics T-Slot Extrusion is available in 10 different lengths from 48mm to 1000mm. It is strong while light-weight. It can be easily cut to your own custom size.

1-1 Motor Kit, 5mm Hex Shaft
The Studica Robotics 1:1 motor kit can be used with the Studica Maverick or any FTC legal motor such as the Neverest Classic (6600 RPM) or the REV HD Hex motor (6000RPM).

1-1 Motor Kit, 6mm D-Shaft
The Studica Robotics 1:1 motor kit can be used with the Studica Maverick or any FTC legal motor such as the Neverest Classic (6600 RPM) or the REV HD Hex motor (6000 RPM). The kit includes a faceplate which supports the Studica Robotics building platform. The shaft is press-fit onto the motor's shaft. It is recommended that the shaft be supported by a bearing (part # 76302 for the Studica building system).

128 Tooth Gear
A 128 tooth gear for robotics design, made from 6061-T6 aluminum, with a 6.35mm thickness and a 14mm hole diameter.

13 Tooth Bevel Gear (2 pack)
A Studica Robotics 13-tooth bevel gear (2 pack) for use in robotics design builds.

20 Pin Screw Terminal Block Connector
Used to replace or supplement connector on NI my-DAQ Kit.
")
25mm Male to Female Standoff (12 pack)
A Studica Robotics 25mm male to female (12 pack) standoff for robotics design.
")
25mm Standoff (12 pack)
A twelve pack of 25mm Studica Robotics standoffs used for robotics design builds.

26 Tooth Bevel Gear (2 pack)
A Studica Robotics 26-tooth bevel gear for use in robotics design and competitions.
")
30 Tooth Bevel Gear, 1-to-1 Set (2 pack)
The Studica Robotics 30-tooth bevel gear, 1-1 set (2 pack) is ideal for robotics design builds.
")
32 Tooth Gear (2 pack)
The Studica Robotics 32-tooth gear (2-pack) is ideal for use with robotics design builds.